Un quart de siècle d'ACC : le régulateur de vitesse adaptatif
Interview avec Bernhard Lucas, ingénieur chez Bosch
Sous la carrosserie des véhicules modernes se trouvent de nombreux systèmes d'aide à la conduite, qui rendent la conduite plus sûre et plus confortable. Ils contribuent à atténuer, voire à prévenir complètement, les conséquences des accidents, à apporter une assistance dans certaines situations de conduite ou à prendre en charge certaines tâches de manière autonome.
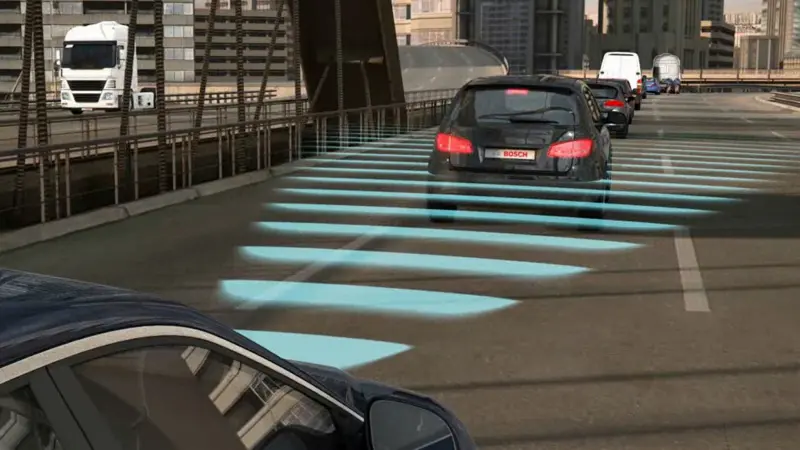
En 2000, Bosch a établi une nouvelle norme avec le lancement du régulateur de vitesse adaptatif (ACC) par radar. Ce système détecte les véhicules qui précèdent, détermine leur vitesse et maintient la distance souhaitée en freinant et en accélérant. Cela réduit considérablement la charge de travail des conducteurs, notamment sur autoroute et voie rapide.
Lorsque Bosch a créé son département de développement radar en 1995, Bernhard Lucas a été l'un des premiers à le rejoindre. Pendant les 24 années suivantes, il a travaillé exclusivement sur les radars Bosch et a joué un rôle clé dans leur développement. Le premier système radar est entré en production en 2000, mettant fin à une longue période de hauts et de bas et posant les bases d'une grande réussite.
Dans cette interview, Bernhard Lucas explique comment tout a commencé.

Comment Bosch s'est-il intéressé au radar?
Le radar est apparu dans les années 1970. Souvenez-vous : plus la fréquence est basse, plus il est facile à manipuler. Cependant, les antennes sont devenues de plus en plus grandes, ce qui le rendait inadapté aux voitures. Le véritable essor du radar a eu lieu avec le projet Prometheus, qui a porté sur un large éventail de systèmes, notamment les aides au stationnement, les capteurs à ultrasons et l'ACC.
Le projet Prometheus
Le projet Prometheus était une initiative de recherche européenne majeure qui s'est déroulée de 1986 à 1994. Son objectif était d'améliorer l'efficacité, le respect de l'environnement et la sécurité du trafic routier. Parmi les participants figuraient des constructeurs automobiles, des équipementiers, des entreprises d'électronique et des instituts scientifiques.
Aviez-vous une idée précise du fonctionnement du système dès le départ?
À l'origine, il s'agissait uniquement d'un système d'alerte de collision. Plus tard, il est devenu un système de suivi de trajectoire, ou système de « verrouillage de la cible » : votre voiture se concentre sur le véhicule qui précède, et vous roulez derrière lui. Dès que le véhicule qui précède disparaît, le système s'arrête. Personne n'imaginait que le système pourrait interpréter les différentes voies, qu'il serait capable de déterminer quel véhicule suivre, notamment dans les virages. Après tout, le radar regarde droit devant, et il n'y avait pas de caméras dans les voitures à l'époque. Et personne n'imaginait qu'une résolution angulaire serait possible. Mesurer la distance et la vitesse est relativement simple, mais mesurer les positions latérales, comme la gauche, la droite ou le centre, est complexe. À l'époque, on parlait de méthode d'estimation d'angle, mais celle-ci repose bien sûr sur des algorithmes.
Et puis le développement a commencé?
Oui, initialement, nous voulions construire le système avec des composantes externes, mais le fournisseur n'a pas pu fournir la qualité et les quantités souhaitées. Parallèlement, Bosch envisageait déjà de produire l'émetteur-récepteur radar lui-même, et celui-ci a effectivement été mis en production à Backnang, près de Stuttgart, dans ce qui était alors le secteur d'activité Technologies de communication.
Comment se sont déroulés les essais routiers ?
Bien sûr, il y a eu quelques contretemps. Nous étions préoccupés par les problèmes avec les voies adjacentes. Si vous utilisiez l'ACC sur la voie de gauche et qu'il n'y avait aucun véhicule devant, vous pouviez être ralenti par les véhicules de droite. Ce n'est pas particulièrement dangereux – la décélération est limitée par l'ACC, elle n'atteint donc pas la plage critique pour la sécurité – mais c'est très gênant pour le conducteur. Le plus grand défi consistait à déterminer l'angle correct, principalement en raison de ce que l'on appelle la propagation par trajets multiples. Les réflexions sur les glissières de sécurité en sont un exemple : les glissières de sécurité, surtout les plus hautes, agissent comme un miroir pour le radar. Lorsque le faisceau radar rebondit sur la glissière de sécurité, le système pense qu'il provient de cette direction et actionne les freins. Étonnamment, le béton réfléchit également le faisceau.

Ce n'étaient probablement pas les seuls problèmes, n'est-ce pas ?
Les cas particuliers que nous avons découverts lors du développement des systèmes de freinage d'urgence étaient tout simplement bizarres. Les simulations permettent de nombreuses avancées, mais nous avons parcouru des milliers de kilomètres avec des conducteurs d'essai et avons fait de nombreuses découvertes intéressantes. Par exemple, certains parkings souterrains ont des entrées où la route descend brusquement, de sorte qu'on ne voit que le plafond du garage en entrant. Les radars peuvent également confondre certains panneaux métalliques avec des véhicules, ou même des canettes de soda abandonnées sur le bord de la route : ce sont les meilleurs réflecteurs.
Comment avez-vous réussi à faire en sorte que le système reconnaisse ces « cas particuliers » comme inoffensifs et n'y réagissant pas ?
Nous les avons traités un par un et avons trouvé des solutions. Vous pouvez par exemple saisir des estimations de hauteur pour l'entrée du parking souterrain. Certains objets peuvent également être identifiés par des signaux radar ; les obstacles sont-ils plats ou surélevés ? Avec un objet surélevé, on observe la trajectoire directe des faisceaux radar et la trajectoire au sol. Avec un objet plat comme une plaque d'égout, il n'y a pas de trajectoire au sol. Cela permet de distinguer les plaques d'égout des véhicules.

Finalement, rien ne s'est opposé au lancement de la production.
Certes, mais la période a été difficile. La première génération présentait des coûts de production élevés et des séries réduites. Nous avons réussi à réduire considérablement les coûts de la deuxième génération, mais nous n'avions que quelques clients. Et ensuite ? La troisième génération. Nous avons réussi à passer de composantes coûteuses comme l'arséniure de gallium à des plaquettes de silicium plus ou moins conventionnelles. L'alliance de notre expertise en composantes et de notre connaissance des systèmes a véritablement été la clé du succès. Il a fallu 13 ans pour produire le premier million de radars, puis 13 mois supplémentaires pour le deuxième million. Et récemment, nous avons fêté notre 100 millionième. C'est incroyable !
Voyez également le lien vers la dernière réglementation européenne relative aux systèmes d'aide à la conduite.

Auteur : Bettina Simon